¿Cómo evaluamos con precisión una integral definida como \(\int_0^1 e^{-x^2} \, dx\) cuando no podemos usar el Primer Teorema Fundamental del Cálculo porque el integrando carece de una antiderivada algebraica elemental? ¿Hay formas de generar estimaciones precisas sin usar valores extremadamente grandes de \(n\) en sumas de Riemann?
¿Qué es la Regla del Trapecio, y cómo se relaciona con las sumas de Riemann izquierda, derecha y media?
¿Cómo se relacionan los errores en la Regla del Trapecio y la Regla del Punto Medio, y cómo pueden usarse para desarrollar una regla aún más precisa?
Cuando primero exploramos encontrar el área neta firmada delimitada por una curva, desarrollamos el concepto de una suma de Riemann como una herramienta de estimación útil y un paso clave en la definición de la integral definida. Recuerda que las sumas de Riemann izquierda, derecha, y media de una función \(f\) en un intervalo \([a,b]\) se dan por
\begin{align}
L_n = f(x_0) \Delta x + f(x_1) \Delta x + \cdots + f(x_{n-1}) \Delta x \amp= \sum_{i = 0}^{n-1} f(x_i) \Delta x,\tag{5.6.1}\\
R_n = f(x_1) \Delta x + f(x_2) \Delta x + \cdots + f(x_{n}) \Delta x \amp= \sum_{i = 1}^{n} f(x_i) \Delta x,\tag{5.6.2}\\
M_n = f(\overline{x}_1) \Delta x + f(\overline{x}_2) \Delta x + \cdots + f(\overline{x}_{n}) \Delta x \amp= \sum_{i = 1}^{n} f(\overline{x}_i) \Delta x\text{,}\tag{5.6.3}
\end{align}
donde \(x_0 = a\text{,}\)\(x_i = a + i\Delta x\text{,}\)\(x_n = b\text{,}\) y \(\Delta x = \frac{b-a}{n}\text{.}\) Para la suma media, definimos \(\overline{x}_{i} = (x_{i-1} + x_i)/2\text{.}\)
Una suma de Riemann es una suma de áreas (posiblemente firmadas) de rectángulos. El valor de \(n\) determina el número de rectángulos, y nuestra elección de puntos finales izquierdos, puntos finales derechos, o puntos medios determina las alturas de los rectángulos. Podemos ver las similitudes y diferencias entre estas tres opciones en Figura 5.6.1, donde consideramos la función \(f(x) = \frac{1}{20}(x-4)^3 + 7\) en el intervalo \([1,8]\text{,}\) y usamos 5 rectángulos para cada una de las sumas de Riemann.
Figure5.6.1.Sumas de Riemann izquierda, derecha y media para \(y = f(x)\) en \([1,8]\) con 5 subintervalos.
Aunque es un buen ejercicio calcular algunas sumas de Riemann a mano, solo para asegurarnos de que entendemos cómo funcionan y cómo varía la función, el número de subintervalos, y la elección de puntos finales o puntos medios afecta el resultado, usar tecnología computacional es la mejor manera de determinar \(L_n\text{,}\)\(R_n\text{,}\) y \(M_n\text{.}\) Cualquier sistema de álgebra computacional ofrecerá esta capacidad; como vimos en Actividad de Previsualización 4.3.1, una opción sencilla que está disponible gratuitamente en línea es este applet 1
gvsu.edu/s/a9
. Nota que podemos ajustar la fórmula para \(f(x)\text{,}\) la ventana de valores de \(x\) y \(y\) de interés, el número de subintervalos y el método. (Consulta Actividad de Previsualización 4.3.1 para cualquier recordatorio necesario sobre cómo funciona el applet.)
En esta sección exploramos varias alternativas diferentes para estimar integrales definidas. Nuestro objetivo principal es desarrollar fórmulas para estimar integrales definidas con precisión sin usar un gran número de rectángulos.
Actividad Introductoria5.6.1.
A medida que comenzamos a investigar formas de aproximar integrales definidas, será revelador comparar los resultados con integrales cuyos valores exactos conocemos. Con ese fin, la siguiente secuencia de preguntas se centra en \(\int_0^3 x^2 \, dx\text{.}\)
con la función \(f(x) = x^2\) en la ventana de valores de \(x\) desde \(0\) hasta \(3\) para calcular \(L_3\text{,}\) la suma de Riemann izquierda con tres subintervalos.
De igual manera, usa el applet para calcular \(R_3\) y \(M_3\text{,}\) las sumas de Riemann derecha y media con tres subintervalos, respectivamente.
Usa el Teorema Fundamental del Cálculo para calcular el valor exacto de \(I = \int_0^3 x^2 \, dx\text{.}\)
Definimos el error que resulta de una aproximación de una integral definida como el valor de la aproximación menos el valor exacto de la integral. ¿Cuál es el error que resulta de usar \(L_3\text{?}\) ¿De \(R_3\text{?}\) ¿De \(M_3\text{?}\)
En lo que sigue en esta sección, aprenderemos un nuevo enfoque para estimar el valor de una integral definida conocido como la Regla del Trapecio. La idea básica es usar trapecios, en lugar de rectángulos, para estimar el área bajo una curva. ¿Cuál es la fórmula para el área de un trapecio con bases de longitud \(b_1\) y \(b_2\) y altura \(h\text{?}\)
Trabajando a mano, estima el área bajo \(f(x) = x^2\) en \([0,3]\) usando tres subintervalos y tres trapecios correspondientes. ¿Cuál es el error en esta aproximación? ¿Cómo se compara con los errores que calculaste en (d)?
Subsection5.6.1La Regla del Trapecio
Hasta ahora, hemos usado los cuadriláteros más simples posibles (es decir, rectángulos) para estimar áreas. Sin embargo, es natural preguntarse si otras formas familiares podrían servirnos aún mejor.
Una alternativa a \(L_n\text{,}\)\(R_n\text{,}\) y \(M_n\) se llama la Regla del Trapecio. En lugar de usar un rectángulo para estimar el área (firmada) delimitada por \(y = f(x)\) en un pequeño intervalo, usamos un trapecio. Por ejemplo, en Figura 5.6.2, estimamos el área bajo la curva usando tres subintervalos y los trapecios que resultan de conectar los puntos correspondientes en la curva con líneas rectas.
Figure5.6.2.Estimando \(\int_a^b f(x) \ dx\) usando tres subintervalos y trapecios, en lugar de rectángulos, donde \(a = x_0\) y \(b = x_3\text{.}\)
La mayor diferencia entre la Regla del Trapecio y una suma de Riemann es que en cada subintervalo, la Regla del Trapecio usa dos valores de la función, en lugar de uno, para estimar el área (firmada) delimitada por la curva. Por ejemplo, para calcular \(D_1\text{,}\) el área del trapecio en \([x_0, x_1]\text{,}\) observamos que la base izquierda tiene longitud \(f(x_0)\text{,}\) mientras que la base derecha tiene longitud \(f(x_1)\text{.}\) La altura del trapecio es \(x_1 - x_0 = \Delta x = \frac{b-a}{3}\text{.}\) El área de un trapecio es el promedio de las bases multiplicado por la altura, así que tenemos
Usando cálculos similares para \(D_2\) y \(D_3\text{,}\) encontramos que \(T_3\text{,}\) la aproximación trapezoidal a \(\int_a^b f(x) \, dx\) se da por
Debido a que se están usando tanto los puntos finales izquierdos como los derechos, reconocemos dentro de la aproximación trapezoidal el uso de sumas de Riemann izquierda y derecha. Reorganizando la expresión para \(T_3\) eliminando factores de \(\frac{1}{2}\) y \(\Delta x \text{,}\) agrupando las evaluaciones de \(f\) en los puntos finales izquierdo y derecho, vemos que
Ahora observamos que han surgido dos sumas familiares. La suma de Riemann izquierda \(L_3\) es \(L_3 = f(x_0) \Delta x + f(x_1) \Delta x + f(x_2) \Delta x\text{,}\) y la suma de Riemann derecha es \(R_3 = f(x_1) \Delta x + f(x_2) \Delta x + f(x_3) \Delta x\text{.}\) Sustituyendo \(L_3\) y \(R_3\) por las expresiones correspondientes en Ecuación (5.6.4), se sigue que \(T_3 = \frac{1}{2} \left[ L_3 + R_3 \text{.}\) Así hemos visto un resultado muy importante: usar trapecios para estimar el área (firmada) delimitada por una curva es lo mismo que promediar las estimaciones generadas usando los puntos finales izquierdo y derecho.
La Regla del Trapecio.
La aproximación trapezoidal, \(T_n\text{,}\) de la integral definida \(\int_a^b f(x) \, dx\) usando \(n\) subintervalos se da por la regla
En esta actividad, exploramos las relaciones entre los errores generados por las aproximaciones de izquierda, derecha, punto medio, y trapecio a la integral definida \(\int_1^2 \frac{1}{x^2} \, dx\text{.}\)
Usa el Primer Teorema Fundamental del Cálculo para evaluar \(\int_1^2 \frac{1}{x^2} \, dx\) exactamente.
Usa tecnología de computación apropiada para calcular las siguientes aproximaciones para \(\int_1^2 \frac{1}{x^2} \, dx\text{:}\)\(T_4\text{,}\)\(M_4\text{,}\)\(T_8\text{,}\) y \(M_8\text{.}\)
Sea el error que resulta de una aproximación el valor de la aproximación menos el valor exacto de la integral definida. Por ejemplo, si dejamos que \(E_{T,4}\) represente el error que resulta de usar la regla del trapecio con 4 subintervalos para estimar la integral, tenemos
Basado en tu trabajo en (a) y (b) arriba, calcula \(E_{T,4}\text{,}\)\(E_{T,8}\text{,}\)\(E_{M,4}\text{,}\)\(E_{M,8}\text{.}\)
¿Qué regla sobreestima consistentemente el valor exacto de la integral definida? ¿Qué regla subestima consistentemente la integral definida?
¿Qué comportamiento(s) de la función \(f(x) = \frac{1}{x^2}\) llevan a tus observaciones en (d)?
Subsection5.6.2Comparando las Reglas del Punto Medio y del Trapecio
Sabemos por la definición de la integral definida que si dejamos que \(n\) sea lo suficientemente grande, podemos hacer cualquiera de las aproximaciones \(L_n\text{,}\)\(R_n\text{,}\) y \(M_n\) tan cercanas como queramos (en teoría) al valor exacto de \(\int_a^b f(x) \, dx\text{.}\) Por lo tanto, puede ser natural preguntarse por qué alguna vez usamos alguna regla que no sea \(L_n\) o \(R_n\) (con un valor de \(n\) suficientemente grande) para estimar una integral definida. Una de las razones principales es que a medida que \(n \to \infty\text{,}\)\(\Delta x = \frac{b-a}{n} \to 0\text{,}\) y así en un cálculo de suma de Riemann con un valor grande de \(n\text{,}\) terminamos multiplicando por un número que está muy cerca de cero. Hacerlo a menudo genera errores de redondeo, porque representar números cercanos a cero con precisión es un desafío persistente para las computadoras.
Por lo tanto, exploramos formas de estimar integrales definidas con altos niveles de precisión, pero sin usar valores extremadamente grandes de \(n\text{.}\) Prestar mucha atención a los patrones en los errores, como los observados en Actividad 5.6.2, es una forma de comenzar a ver algunos enfoques alternativos.
Para empezar, comparamos los errores en las reglas del Punto Medio y del Trapecio. Primero, considera una función que es cóncava hacia arriba en un intervalo dado, e imagina aproximar el área delimitada en ese intervalo por ambas reglas del Punto Medio y del Trapecio usando un solo subintervalo.
Figure5.6.3.Estimando \(\int_a^b f(x) \ dx\) usando un solo subintervalo: a la izquierda, la regla del trapecio; en el medio, la regla del punto medio; a la derecha, una forma modificada de pensar en la regla del punto medio.
Como se ve en Figura 5.6.3, es evidente que siempre que la función sea cóncava hacia arriba en un intervalo, la Regla del Trapecio con un subintervalo, \(T_1\text{,}\) sobreestimará el valor exacto de la integral definida en ese intervalo. A partir de un análisis cuidadoso de la línea que delimita la parte superior del rectángulo para la Regla del Punto Medio (mostrada en magenta), vemos que si rotamos este segmento de línea hasta que sea tangente a la curva en el punto medio del intervalo (como se muestra a la derecha en Figura 5.6.3), el trapecio resultante tiene el mismo área que \(M_1\text{,}\) y este valor es menor que el valor exacto de la integral definida. Por lo tanto, cuando la función es cóncava hacia arriba en el intervalo, \(M_1\) subestima el valor verdadero de la integral.
Figure5.6.4.Comparando el error en la estimación de \(\int_a^b f(x) \ dx\) usando un solo subintervalo: en rojo, el error de la regla del trapecio; en rojo claro, el error de la regla del punto medio.
Estas observaciones se extienden fácilmente a la situación donde la concavidad de la función permanece consistente pero usamos valores más grandes de \(n\) en las Reglas del Punto Medio y del Trapecio. Por lo tanto, siempre que \(f\) sea cóncava hacia arriba en \([a,b]\text{,}\)\(T_n\) sobreestimará el valor de \(\int_a^b f(x) \, dx\text{,}\) mientras que \(M_n\) subestimará \(\int_a^b f(x) \, dx\text{.}\) Las observaciones inversas son ciertas en la situación donde \(f\) es cóncava hacia abajo.
A continuación, comparamos el tamaño de los errores entre \(M_n\) y \(T_n\text{.}\) Nuevamente, nos enfocamos en \(M_1\) y \(T_1\) en un intervalo donde la concavidad de \(f\) es consistente. En Figura 5.6.4, donde el error de la Regla del Trapecio está sombreado en rojo, mientras que el error de la Regla del Punto Medio está sombreado en rojo más claro, es visualmente aparente que el error en la Regla del Trapecio es más significativo. Para ver cuánto más significativo, consideremos dos ejemplos y algunos cálculos particulares.
Si dejamos que \(f(x) = 1-x^2\) y consideramos \(\int_0^1 f(x) \,dx\text{,}\) sabemos por el Primer Teorema Fundamental del Cálculo que el valor exacto de la integral es
Usando tecnología apropiada para calcular \(M_4\text{,}\)\(M_8\text{,}\)\(T_4\text{,}\) y \(T_8\text{,}\) así como los errores correspondientes \(E_{M,4}\text{,}\)\(E_{M,8}\text{,}\)\(E_{T,4}\text{,}\) y \(E_{T,8}\text{,}\) como hicimos en Actividad 5.6.2, encontramos los resultados resumidos en Tabla 5.6.5. También incluimos las aproximaciones y sus errores para el ejemplo \(\int_1^2 \frac{1}{x^2} \, dx\) de Actividad 5.6.2.
Table5.6.5.Cálculos de \(T_4\text{,}\)\(M_4\text{,}\)\(T_8\) y \(M_8\text{,}\) junto con los errores correspondientes, para las integrales definidas \(\int_0^1 (1-x^2) \ dx\) y \(\int_1^2 \frac{1}{x^2} \ dx\text{.}\)
Regla
\(\int_0^1 (1-x^2) \,dx = 0.\overline{6}\)
error
\(\int_1^2 \frac{1}{x^2} \, dx = 0.5\)
error
\(T_4\)
\(0.65625\)
\(-0.0104166667\)
\(0.5089937642\)
\(0.0089937642\)
\(M_4\)
\(0.671875\)
\(0.0052083333\)
\(0.4955479365\)
\(-0.0044520635\)
\(T_8\)
\(0.6640625\)
\(-0.0026041667\)
\(0.5022708502\)
\(0.0022708502\)
\(M_8\)
\(0.66796875\)
\(0.0013020833\)
\(0.4988674899\)
\(-0.0011325101\)
Para una función dada \(f\) y un intervalo \([a,b]\text{,}\)\(E_{T,4} = T_4 - \int_a^b f(x) \,dx\) calcula la diferencia entre la aproximación generada por la Regla del Trapecio con \(n = 4\) y el valor exacto de la integral definida. Si miramos no solo \(E_{T,4}\text{,}\) sino también los otros errores generados al usar \(T_n\) y \(M_n\) con \(n = 4\) y \(n = 8\) en los dos ejemplos mencionados en Table 5.6.5, vemos un patrón evidente. No solo el signo del error (que mide si la regla genera una sobreestimación o subestimación) está ligado a la regla utilizada y la concavidad de la función, sino que la magnitud de los errores generados por \(T_n\) y \(M_n\) parece estar estrechamente conectada. En particular, los errores generados por la Regla del Punto Medio parecen ser aproximadamente la mitad (en valor absoluto) de los generados por la Regla del Trapecio.
Es decir, podemos observar en ambos ejemplos que \(E_{M,4} \approx -\frac{1}{2} E_{T,4}\) y \(E_{M,8} \approx -\frac{1}{2}E_{T,8}\text{.}\) Esta propiedad de las Reglas del Punto Medio y del Trapecio resulta ser general: para una función de concavidad consistente, el error en la Regla del Punto Medio tiene el signo opuesto y aproximadamente la mitad de la magnitud del error de la Regla del Trapecio. Escrito simbólicamente,
Esta importante relación sugiere una manera de combinar las Reglas del Punto Medio y del Trapecio para crear una aproximación aún más precisa a una integral definida.
Subsection5.6.3Regla de Simpson
Cuando desarrollamos por primera vez la Regla del Trapecio, observamos que es un promedio de las sumas de Riemann Izquierda y Derecha:
Si una función está siempre aumentando o siempre disminuyendo en el intervalo \([a,b]\text{,}\) una de \(L_n\) y \(R_n\) sobreestimará el valor verdadero de \(\int_a^b f(x) \, dx\text{,}\) mientras que la otra subestimará la integral. Así, los errores que resultan de \(L_n\) y \(R_n\) tendrán signos opuestos; por lo que promediar \(L_n\) y \(R_n\) elimina una cantidad considerable del error presente en las respectivas aproximaciones. De manera similar, tiene sentido pensar en promediar \(M_n\) y \(T_n\) para generar una aproximación aún más precisa.
Acabamos de observar que \(M_n\) es típicamente aproximadamente el doble de preciso que \(T_n\text{.}\) Así que usamos el promedio ponderado
La regla para \(S_{2n}\) dada por Equation (5.6.5) es usualmente conocida como Regla de Simpson. 3
Thomas Simpson fue un matemático del siglo XVIII; su idea fue extender la regla del trapecio, pero en lugar de usar líneas rectas para construir trapecios, usar funciones cuadráticas para construir regiones cuya área estaba delimitada por parábolas (cuyas áreas podía encontrar exactamente). La Regla de Simpson a menudo se desarrolla desde la perspectiva más sofisticada de usar interpolación por funciones cuadráticas.
Nota que usamos “\(S_{2n}\)” en lugar de “\(S_n\)” ya que los puntos \(n\) que usa la Regla del Punto Medio son diferentes de los puntos \(n\) que usa la Regla del Trapecio, y por lo tanto la Regla de Simpson está usando \(2n\) puntos para evaluar la función. Nos basamos en los resultados en Table 5.6.5 para ver las aproximaciones generadas por la Regla de Simpson. En particular, en Table 5.6.6, incluimos todos los resultados en Table 5.6.5, pero incluimos resultados adicionales para \(S_8 = \frac{2M_4 + T_4}{3}\) y \(S_{16} = \frac{2M_8 + T_8}{3}\text{.}\)
Table5.6.6.Table 5.6.5 actualizada para incluir \(S_8\text{,}\)\(S_{16}\) y los errores correspondientes.
Regla
\(\int_0^1 (1-x^2) \,dx = 0.\overline{6}\)
error
\(\int_1^2 \frac{1}{x^2} \, dx = 0.5\)
error
\(T_4\)
\(0.65625\)
\(-0.0104166667\)
\(0.5089937642\)
\(0.0089937642\)
\(M_4\)
\(0.671875\)
\(0.0052083333\)
\(0.4955479365\)
\(-0.0044520635\)
\(S_8\)
\(0.6666666667\)
\(0\)
\(0.5000298792\)
\(0.0000298792\)
\(T_8\)
\(0.6640625\)
\(-0.0026041667\)
\(0.5022708502\)
\(0.0022708502\)
\(M_8\)
\(0.66796875\)
\(0.0013020833\)
\(0.4988674899\)
\(-0.0011325101\)
\(S_{16}\)
\(0.6666666667\)
\(0\)
\(0.5000019434\)
\(0.0000019434\)
Los resultados vistos en Table 5.6.6 son sorprendentes. Si consideramos la aproximación \(S_{16}\) de \(\int_1^2 \frac{1}{x^2} \, dx\text{,}\) el error es solo \(E_{S,16} = 0.0000019434\text{.}\) En contraste, \(L_8 = 0.5491458502\text{,}\) por lo que el error de esa estimación es \(E_{L,8} = 0.0491458502\text{.}\) Además, observamos que generar las aproximaciones para la Regla de Simpson es casi ningún trabajo adicional: una vez que tenemos \(L_n\text{,}\)\(R_n\) y \(M_n\) para un valor dado de \(n\text{,}\) es un ejercicio simple generar \(T_n\text{,}\) y de ahí calcular \(S_{2n}\text{.}\) Finalmente, nota que el error en las aproximaciones de la Regla de Simpson de \(\int_0^1 (1-x^2) \, dx\) es cero! 4
Similar a cómo las aproximaciones del Punto Medio y del Trapecio son exactas para funciones lineales, las aproximaciones de la Regla de Simpson son exactas para funciones cuadráticas y cúbicas. Ver discusión adicional sobre este tema más adelante en la sección y en los ejercicios.
Estas reglas no solo son útiles para aproximar integrales definidas como \(\int_0^1 e^{-x^2} \, dx\text{,}\) para las cuales no podemos encontrar una antiderivada elemental de \(e^{-x^2}\text{,}\) sino también para aproximar integrales definidas cuando se nos da una función a través de una tabla de datos.
Activity5.6.3.
Un coche que viaja por una carretera recta está frenando y su velocidad se mide en varios puntos diferentes en el tiempo, como se muestra en la siguiente tabla. Supón que \(v\) es continua, siempre decreciente, y siempre decreciente a una tasa decreciente, como sugiere la información.
segundos, \(t\)
Velocidad en ft/seg, \(v(t)\)
\(0\)
\(100\)
\(0.3\)
\(99\)
\(0.6\)
\(96\)
\(0.9\)
\(90\)
\(1.2\)
\(80\)
\(1.5\)
\(50\)
\(1.8\)
\(0\)
Table5.6.7.Datos para el coche que frena.
Figure5.6.8.Ejes para graficar los datos en Actividad 5.6.3.
Grafica los datos dados en el conjunto de ejes proporcionados en Figura 5.6.8 con el tiempo en el eje horizontal y la velocidad en el eje vertical.
¿Qué integral definida te dará la distancia exacta que recorrió el coche en \([0,1.8]\text{?}\)
Estima la distancia total recorrida en \([0,1.8]\) calculando \(L_3\text{,}\)\(R_3\) y \(T_3\text{.}\) ¿Cuál de estos subestima la distancia real recorrida?
Estima la distancia total recorrida en \([0,1.8]\) calculando \(M_3\text{.}\) ¿Es esto una sobreestimación o una subestimación? ¿Por qué?
Usando tus resultados de (c) y (d), mejora tu estimación utilizando la Regla de Simpson.
¿Cuál es tu mejor estimación de la velocidad promedio del coche en \([0,1.8]\text{?}\) ¿Por qué? ¿Cuáles son las unidades de esta cantidad?
Subsection5.6.4Observaciones generales sobre \(L_n\text{,}\)\(R_n\text{,}\)\(T_n\text{,}\)\(M_n\) y \(S_{2n}\text{.}\)
Al concluir nuestra discusión sobre la aproximación numérica de integrales definidas, es importante resumir las tendencias generales en cómo las diversas reglas sobreestiman o subestiman el valor verdadero de una integral definida, y por cuánto. Para revisar algunas observaciones pasadas y ver algunas nuevas, consideramos la siguiente actividad.
Activity5.6.4.
Considera las funciones \(f(x) = 2-x^2\text{,}\)\(g(x) = 2-x^3\text{,}\) y \(h(x) = 2-x^4\text{,}\) todas en el intervalo \([0,1]\text{.}\) Para cada una de las preguntas que requieren una respuesta numérica a continuación, escribe tu respuesta exactamente en forma de fracción.
En los tres conjuntos de ejes proporcionados en Figura 5.6.9, dibuja un gráfico de cada función en el intervalo \([0,1]\text{,}\) y calcula \(L_1\) y \(R_1\) para cada una. ¿Qué observas?
Calcula \(M_1\) para cada función para aproximar \(\int_0^1 f(x) \,dx\text{,}\)\(\int_0^1 g(x) \,dx\text{,}\) y \(\int_0^1 h(x) \,dx\text{,}\) respectivamente.
Calcula \(T_1\) para cada una de las tres funciones, y por lo tanto calcula \(S_2\) para cada una de las tres funciones.
Evalúa cada una de las integrales \(\int_0^1 f(x) \,dx\text{,}\)\(\int_0^1 g(x) \,dx\text{,}\) y \(\int_0^1 h(x) \,dx\) exactamente usando el Primer FTC.
Para cada una de las tres funciones \(f\text{,}\)\(g\text{,}\) y \(h\text{,}\) compara los resultados de \(L_1\text{,}\)\(R_1\text{,}\)\(M_1\text{,}\)\(T_1\text{,}\) y \(S_2\) con el valor verdadero de la integral definida correspondiente. ¿Qué patrones observas?
Figure5.6.9.Ejes para graficar las funciones en Actividad 5.6.4.
Los resultados vistos en Activity 5.6.4 se generalizan bien. Por ejemplo, si \(f\) está disminuyendo en \([a,b]\text{,}\)\(L_n\) sobreestimará el valor exacto de \(\int_a^b f(x) \,dx\text{,}\) y si \(f\) es cóncava hacia abajo en \([a,b]\text{,}\)\(M_n\) sobreestimará el valor exacto de la integral. Un excelente ejercicio es escribir una colección de escenarios de posibles comportamientos de funciones, y luego categorizar si cada uno de \(L_n\text{,}\)\(R_n\text{,}\)\(T_n\) y \(M_n\) es una sobreestimación o subestimación.
Finalmente, hacemos dos notas importantes sobre la Regla de Simpson. Cuando T. Simpson desarrolló por primera vez esta regla, su idea fue reemplazar la función \(f\) en un intervalo dado con una función cuadrática que compartiera tres valores con la función \(f\text{.}\) Al hacerlo, garantizó que esta nueva regla de aproximación sería exacta para la integral definida de cualquier polinomio cuadrático. En una de las sorpresas agradables del análisis numérico, resulta que aunque fue diseñada para ser exacta para polinomios cuadráticos, la Regla de Simpson es exacta para cualquier polinomio cúbico: es decir, si estamos interesados en una integral como \(\int_2^5 (5x^3 - 2x^2 + 7x - 4)\, dx\text{,}\)\(S_{2n}\) siempre será exacta, independientemente del valor de \(n\text{.}\) Esto es solo una pieza más de evidencia que muestra cuán efectiva es la Regla de Simpson como herramienta de aproximación para estimar integrales definidas. 5
Una razón por la que la Regla de Simpson es tan efectiva es que \(S_{2n}\) se beneficia de usar \(2n+1\) puntos de datos. Porque combina \(M_n\text{,}\) que usa \(n\) puntos medios, y \(T_n\text{,}\) que usa los \(n+1\) puntos finales de los subintervalos elegidos, \(S_{2n}\) aprovecha la máxima cantidad de información que tenemos cuando conocemos los valores de la función en los puntos finales y medios de \(n\) subintervalos.
Subsection5.6.5Resumen
Para una integral definida como \(\int_0^1 e^{-x^2} \, dx\) cuando no podemos usar el Primer Teorema Fundamental del Cálculo porque el integrando carece de una antiderivada algebraica elemental, podemos estimar el valor de la integral usando una secuencia de aproximaciones de sumas de Riemann. Típicamente, comenzamos calculando \(L_n\text{,}\)\(R_n\text{,}\) y \(M_n\) para uno o más valores elegidos de \(n\text{.}\)
La Regla del Trapecio, que estima \(\int_a^b f(x) \, dx\) usando trapecios, en lugar de rectángulos, también puede verse como el promedio de las sumas de Riemann Izquierda y Derecha. Es decir, \(T_n = \frac{1}{2}(L_n + R_n)\text{.}\)
La Regla del Punto Medio es típicamente el doble de precisa que la Regla del Trapecio, y los signos de los errores respectivos de estas reglas son opuestos. Por lo tanto, al tomar el promedio ponderado \(S_{2n} = \frac{2M_n + T_n}{3}\text{,}\) podemos construir una aproximación mucho más precisa a \(\int_a^b f(x) \, dx\) usando aproximaciones que ya hemos calculado. La regla para \(S_{2n}\) se conoce como la Regla de Simpson, que también puede desarrollarse aproximando una función continua dada con piezas de polinomios cuadráticos.
Exercises5.6.6Exercises
1.Various methods for \(e^x\) numerically.
In this problem, the notation "SIMP(2)" is actually what we have called "SIMP(4)" in our previous work. Different authors use different notation, and the author of this WeBWorK exercise chooses to write "SIMP(n)" where we have written "SIMP(2n)" in Section 5.6.
Note: for this problem, because later answers depend on earlier ones, you must enter answers for all answer blanks for the problem to be correctly graded. If you would like to get feedback before you completed all computations, enter a "1" for each answer you did not yet compute and then submit the problem. (But note that this will, obviously, result in a problem submission.)
(a) What is the exact value of \(\int_{0}^{4}\,e^x\,dx\text{?}\)
\(\int_{0}^{4}\,e^x\,dx =\)
(b)
Find LEFT(2), RIGHT(2), TRAP(2), MID(2), and SIMP(2); compute the error for each.
LEFT(2)
RIGHT(2)
TRAP(2)
MID(2)
SIMP(2)
value
error
(c)
Repeat part (b) with \(n=4\) (instead of \(n=2\)).
LEFT(4)
RIGHT(4)
TRAP(4)
MID(4)
SIMP(4)
value
error
(d)
For each rule in part (b), as \(n\) goes from \(n=2\) to \(n=4\text{,}\) does the error go down approximately as you would expect? Explain by calculating the ratios of the errors:
Error LEFT(2)/Error LEFT(4) =
Error RIGHT(2)/Error RIGHT(4) =
Error TRAP(2)/Error TRAP(4) =
Error MID(2)/Error MID(4) =
Error SIMP(2)/Error SIMP(4) =
(Be sure that you can explain in words why these do (or don’t) make sense.)
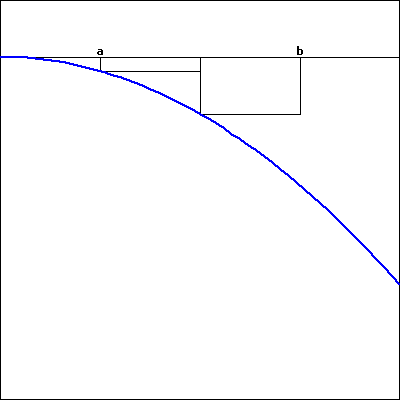
2.Comparison of methods for increasing concave down function.
Using the figure showing \(f(x)\) below, order the following approximations to the integral \(\int_0^3\,f(x)\,dx\) and its exact value from smallest to largest.
(Click on the graph for a larger version.)
Enter each of "LEFT(n)", "RIGHT(n)", "TRAP(n)", "MID(n)" and "Exact" in one of the following answer blanks to indicate the correct ordering:
\(\lt \)\(\lt \)\(\lt \)\(\lt \)
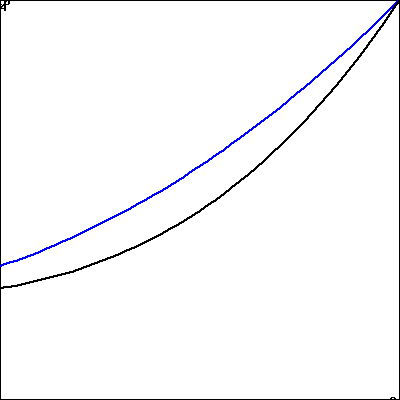
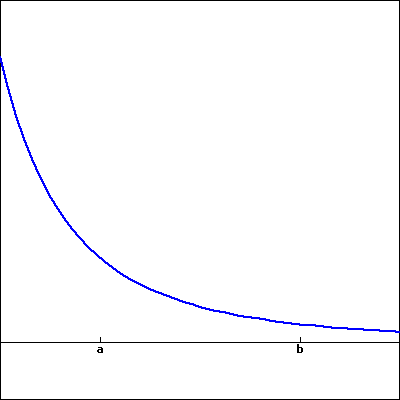
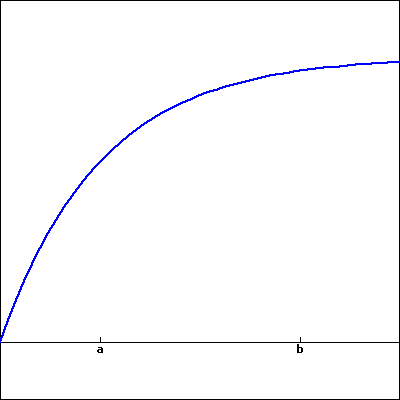
3.Comparing accuracy for two similar functions.
Using a fixed number of subdivisions, we approximate the integrals of \(f\) and \(g\) on the interval shown in the figure below.
(The function \(f(x)\) is shown in blue, and \(g(x)\) in black; click on the graph to get a larger version.)
For which function, \(f\) or \(g\) is LEFT more accurate?
\(\displaystyle f\)
\(\displaystyle g\)
For which function, \(f\) or \(g\) is RIGHT more accurate?
\(\displaystyle f\)
\(\displaystyle g\)
For which function, \(f\) or \(g\) is MID more accurate?
\(\displaystyle f\)
\(\displaystyle g\)
For which function, \(f\) or \(g\) is TRAP more accurate?
\(\displaystyle f\)
\(\displaystyle g\)
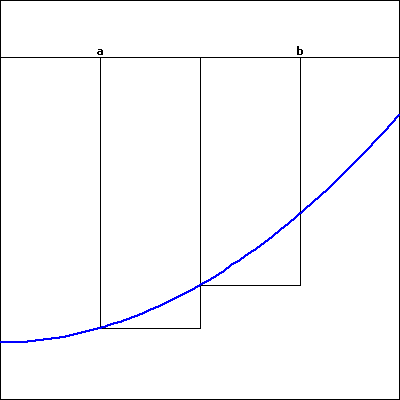
4.Identifying and comparing methods.
Consider the four functions shown below. On the first two, an approximation for \(\int_a^b\,f(x)\,dx\) is shown.
1.
2.
3.
4.
(Click on any graph to get a larger version.)
1. For graph number 1, Which integration method is shown?
midpoint rule
left rule
right rule
trapezoid rule
Is this method an over- or underestimate?
over
under
2. For graph number 2, Which integration method is shown?
right rule
midpoint rule
left rule
trapezoid rule
Is this method an over- or underestimate?
under
over
3. On a copy of graph number 3, sketch an estimate with \(n=2\) subdivisions using the midpoint rule.
Is this method an over- or underestimate?
over
under
4. On a copy of graph number 4, sketch an estimate with \(n=2\) subdivisions using the trapezoid rule.
Is this method an over- or underestimate?
under
over
5.
Consider the definite integral \(\int_0^1 x \tan(x) \, dx\text{.}\)
Explain why this integral cannot be evaluated exactly by using either \(u\)-substitution or by integrating by parts.
Using appropriate subintervals, compute \(L_4\text{,}\)\(R_4\text{,}\)\(M_4\text{,}\)\(T_4\text{,}\) and \(S_8\text{.}\)
Which of the approximations in (b) is an over-estimate to the true value of \(\int_0^1 x \tan(x) \, dx\text{?}\) Which is an under-estimate? How do you know?
6.
For an unknown function \(f(x)\text{,}\) the following information is known.
\(f\) is continuous on \([3,6]\text{;}\)
\(f\) is either always increasing or always decreasing on \([3,6]\text{;}\)
\(f\) has the same concavity throughout the interval \([3,6]\text{;}\)
As approximations to \(\int_3^6 f(x) \, dx\text{,}\)\(L_4 = 7.23\text{,}\)\(R_4 = 6.75\text{,}\) and \(M_4 = 7.05\text{.}\)
Is \(f\) increasing or decreasing on \([3,6]\text{?}\) What data tells you?
Is \(f\) concave up or concave down on \([3,6]\text{?}\) Why?
Determine the best possible estimate you can for \(\int_3^6 f(x) \, dx\text{,}\) based on the given information.
7.
The rate at which water flows through Table Rock Dam on the White River in Branson, MO, is measured in cubic feet per second (CFS). As engineers open the floodgates, flow rates are recorded according to the following chart.
Table5.6.16.Water flow data.
seconds, \(t\)
\(0\)
\(10\)
\(20\)
\(30\)
\(40\)
\(50\)
\(60\)
flow in CFS, \(r(t)\)
\(2000\)
\(2100\)
\(2400\)
\(3000\)
\(3900\)
\(5100\)
\(6500\)
What definite integral measures the total volume of water to flow through the dam in the 60 second time period provided by the table above?
Use the given data to calculate \(M_n\) for the largest possible value of \(n\) to approximate the integral you stated in (a). Do you think \(M_n\) over- or under-estimates the exact value of the integral? Why?
Approximate the integral stated in (a) by calculating \(S_n\) for the largest possible value of \(n\text{,}\) based on the given data.
Compute \(\frac{1}{60} S_n\) and \(\frac{2000+2100+2400+3000+3900+5100+6500}{7}\text{.}\) What quantity do both of these values estimate? Which is a more accurate approximation?